泊车影像系统(RVC)通过后视摄像头采集车辆后方影像,由音响主机显示车辆后方影像和车辅线,从而辅助驾驶员安全、轻松地泊车。
使用方法
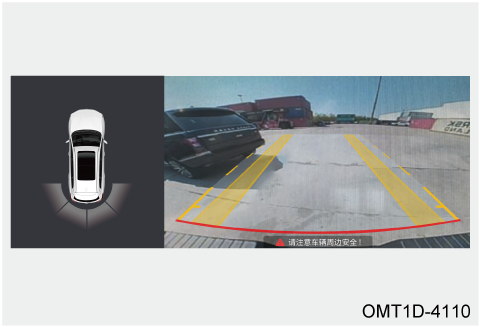
换档手柄挂入R档,进入泊车影像系统(RVC)界面,显示泊车影像和车辅线;车辅线随方向盘转动而动态变化,用于预判倒车车轮的运动轨迹。
| 注意 |
|---|
|
| 警告 |
|---|
|
泊车影像系统(RVC)通过后视摄像头采集车辆后方影像,由音响主机显示车辆后方影像和车辅线,从而辅助驾驶员安全、轻松地泊车。
换档手柄挂入R档,进入泊车影像系统(RVC)界面,显示泊车影像和车辅线;车辅线随方向盘转动而动态变化,用于预判倒车车轮的运动轨迹。
| 注意 |
|---|
|
| 警告 |
|---|
|
全景影像系统(AVM)通过四个摄像头采集车辆周边影像,由音响主机显示车辆周边影像和车辅线,从而辅助驾驶员安全、轻松地泊车。

前摄像头安装位置:前保进气格栅处。

左/右摄像头安装位置:左/右外后视镜底部。

后摄像头安装位置:后牌照上方中部。

整车电源切换至ON模式,变速器档位置于D档,且车速<15km/h时,泊车雷达检测到障碍物进入全景影像系统(AVM);换档手柄挂入N/P档或无障碍物距离信息,延迟15s后退出全景影像系统(AVM)。
整车电源切换至ON模式,且车速<20km/h:
方式1:换档手柄挂入R档,进入全景影像系统(AVM);换档手柄移出R档,延迟15s后,退出全景影像系统(AVM)。
方式2:点击“
 ”开关(指示灯点亮),进入全景影像系统(AVM);再次点击
”开关(指示灯熄灭),退出全景影像系统(AVM)。
”开关(指示灯点亮),进入全景影像系统(AVM);再次点击
”开关(指示灯熄灭),退出全景影像系统(AVM)。
方式3:开启左/右转向灯,进入全景影像系统(AVM)(需开启全景影像系统(AVM)设置中的转向灯激活全景);关闭左右转向灯,退出全景影像系统(AVM)。
方式4:大角度转向过程中进入全景影像系统(AVM)(需开启全景影像系统(AVM)设置中的转角激活全景)。
备注:整车电源切换至OFF模式或车速>30km/h,退出全景影像系统(AVM)。
| 阅读 |
|---|
|
全景影像系统(AVM)提供驾驶辅助便利,但影像中物体并不反应物体真实大小和物距,影像相对于实际有少许的延时和盲区,因此环视功能不能替代驾驶员操作和判断,功能的开启、关闭及使用过程,驾驶员应当注意周围环境、安全驾驶。 |

点击“
 ”开关,非R档,退出全景影像系统(AVM)设置。
”开关,非R档,退出全景影像系统(AVM)设置。
点击“
 ”开关,进入全景影像系统(AVM)设置。
”开关,进入全景影像系统(AVM)设置。
点击“
 ”开关,切换至单侧+ 鸟瞰图。
”开关,切换至单侧+ 鸟瞰图。
点击“
 ”开关,切换至3D视图+鸟瞰图,鸟瞰图小车周围一圈的特定视角按钮切换相应3D视图,3D视图可通过滑动切换任意视角。
”开关,切换至3D视图+鸟瞰图,鸟瞰图小车周围一圈的特定视角按钮切换相应3D视图,3D视图可通过滑动切换任意视角。
点击“
 ”开关,切换至前广角视图。
”开关,切换至前广角视图。
点击“
 ”开关,切换至后广角视图。
”开关,切换至后广角视图。
“
 ”为盲区范围,可能会观察不到障碍物;驾驶员应当注意周围环境,安全驾驶。
”为盲区范围,可能会观察不到障碍物;驾驶员应当注意周围环境,安全驾驶。

点击“
 ”按钮,非R档,退出全景影像系统。
”按钮,非R档,退出全景影像系统。
点击“
 ”按钮,进入全景影像系统设置。
”按钮,进入全景影像系统设置。
点击“
 ”按钮,切换至单侧+鸟瞰图。
”按钮,切换至单侧+鸟瞰图。
点击“
 ”按钮,切换至3D视图+鸟瞰图;点击小车周围一圈的“
”按钮,切换至3D视图+鸟瞰图;点击小车周围一圈的“
 ”按钮切换相应3D视图。
”按钮切换相应3D视图。
点击“
 ”按钮,切换前广角视图,再点击按钮切换后广角视图。
”按钮,切换前广角视图,再点击按钮切换后广角视图。
点击“
 ”按钮,切换前轮侧视图,再点击按钮切换后轮侧视图。
”按钮,切换前轮侧视图,再点击按钮切换后轮侧视图。
| 阅读 |
|---|
|
全景影像系统(AVM)对于泊车和安全驾驶有很大的帮助,建议您在开阔方便的场地提前熟悉这一功能。 |
| 注意 |
|---|
|

【全景启动动画】客户首次通过点击“
”开关进入全景影像系统(AVM),会进入全景启动动画。
【转向灯激活全景】开启左/右转向灯时,显示车辆左/右后侧的3D视图 。
【转角激活全景】大角度转向过程中,进入全景影像系统(AVM)。
【自动放大视图】根据障碍物距离自动进入放大视图。
【门开指示】提示天窗、车门、尾门开关状态。
【车辅线显示】进入全景影像系统(AVM)时,加载静动态车辅线及车轮轨迹线。
【泊车雷达显示】显示相应的雷达距离信息。
【车牌号设置】设置并在车模显示相应的车牌号信息。
【透明车身】改变车模透明度。
【恢复默认设置】恢复默认设置。

【全景启动动画】客户首次通过按下“
 ”按键进入全景影像系统,会进入全景启动动画。
”按键进入全景影像系统,会进入全景启动动画。
【转向灯激活全景】开启左/右转向灯时,显示车辆左/右后侧的3D视图 。
【转角激活全景】大角度转向过程中,进入全景影像系统。
【自动放大视图】根据障碍物距离自动进入放大视图。
【开门指示】提示门开关状态。
【车辅线显示】进入全景影像系统时,加载静动态车辅线及车轮轨迹线。
【泊车雷达显示】显示相应的雷达距离信息(红色、黄色、绿色区域)。
【车牌号设置】设置并在车模显示相应的车牌号信息。
【透明车身】改变车模透明度。
【恢复默认设置】恢复默认设置。
泊车雷达系统是一种雷达探测装置,通过雷达探头(4探头、8探头或12探头)检测车辆的前方和后方是否有障碍物,由音响主机显示障碍物距离的远近、声音报警提示驾驶者,从而辅助驾驶员安全、轻松地泊车。

点击“
 ”开关(指示灯点亮),泊车雷达系统开启;非R档时,再次点击“
”开关(指示灯熄灭),泊车雷达系统退出。
”开关(指示灯点亮),泊车雷达系统开启;非R档时,再次点击“
”开关(指示灯熄灭),泊车雷达系统退出。
备注:泊车雷达系统工作时,当车速>15km/h时,“
”开关指示灯熄灭,退出泊车雷达系统;车速<15km/h时,需再次点击“
”开关(指示灯点亮),重新激活泊车雷达系统。
| 阅读 |
|---|
|
仅8探头、12探头车型配备泊车雷达系统开关。 |
4探头车型:整车电源切换至ON模式,换档手柄挂入R档,激活泊车雷达系统;当雷达探头感应到障碍物时,音响主机会显示距离障碍物的远近(红色、黄色、绿色区域)及报警音提醒。
8探头车型:整车电源切换至ON模式,点击“
”开关(指示灯点亮)或换档手柄挂入R档,激活泊车雷达系统;当雷达探头感应到障碍物时,音响主机会显示距离障碍物的远近(红色、黄色、绿色区域)及报警音提醒。
12探头车型:整车电源切换至ON模式(首次上电,默认开启泊车雷达系统,“
”开关指示灯点亮)或换档手柄挂入R档,激活泊车雷达系统;当雷达探头感应到障碍物时,音响主机会显示距离障碍物的远近(红色、黄色、绿色区域)及报警音提醒;侧雷达探头感应到障碍物时,音响主机显示距离障碍物的远近(红色、黄色、绿色区域),无报警音提醒。
备注:若雷达探头故障时,泊车雷达系统开启会长鸣2s,施加驻车制动或变速器档位置于P档时会屏蔽雷达探头故障报警音。
| 阅读 |
|---|
|
| 注意 |
|---|
|
当车辆在陡峭的斜坡上时。
在果冻状的雪中或雨中行驶时。
无法检测到岩石等低矮的物体。
可能无法检测到高于保险杠的物体。
无法检测到电线、栅栏、绳索等细的物体。
车辆加装高频率的无线电或天线正在使用时。
雷达探头表面被冻住,将无法检测到任何障碍物。
雷达探头被污垢、雪或泥等覆盖,可能无法检测到障碍物。
无法检测到容易吸收超声波的物体(例如:松软的雪、棉和海绵)。
车辆附近噪音大时(例如:车辆喇叭声、摩托车发动机声、大型车辆的气制动声或其它会产生超声波的强烈噪声)。
存在多颗雷达探头检测到障碍物,音响主机需同时显示各个雷达探头与障碍物的远近,声音报警按照距离最近障碍物处理。

清洗车辆时,请用软布或水(低水压)洗去雷达探头表面沾着的雪、泥、灰尘等障碍物。
水枪之类的高压力水流或者较大的外力可能会造成雷达探头损坏;请勿挤压或冲击雷达探头,否则会导致探头无法正常工作。
泊车辅助系统(APA)可以通过泊车雷达系统12个雷达探头和全景影像4个摄像头探测道路两侧搜寻车位并通过音响主机确认目标车位后,辅助驾驶员将车辆辅助泊入或辅助泊出目标车位。

泊车辅助系统(APA)支持的泊入车位类型有平行标线车位、垂直标线车位、倾斜标线车位、平行边界车位、垂直边界车位。

点击显示屏上的泊车辅助系统(APA)按钮,“
 ”为蓝色表示泊车辅助系统(APA)开启;“
”为白色表示泊车辅助系统(APA)关闭。
”为蓝色表示泊车辅助系统(APA)开启;“
”为白色表示泊车辅助系统(APA)关闭。
开启泊车辅助系统(APA),驾驶车辆进行车位搜寻。

步骤1:激活泊车辅助系统(APA)前,驾驶员须系好安全带,并确认车门、前舱盖以及尾门处于关闭状态;
步骤2:点击泊车辅助系统(APA)按钮,开启泊车界面,变速器档位置于D档,车速<25km/h,行驶路径与备选车位间横向距离约0.5m-1.9m之间,开始搜寻车位;
步骤3:泊车辅助系统(APA)默认搜寻右侧车位,若需搜索左侧车位,驾驶员可开启左转向灯;此时若关闭左转向灯,保持左边搜索,开启右转向灯,则右侧搜索激活。
泊车辅助系统(APA)发现可用车位,驾驶员确认目标车位。

步骤1:泊车辅助系统(APA)发现可用车位时,泊车界面会显示车位信息,此时请停车;
步骤2:出现多个可用车位时,驾驶员可在泊车界面选择希望泊入的目标车位,如果不选择目标车位则默认选择就近车位。
车辆辅助泊入。

步骤1:确认目标车位后,点击泊车辅助系统(APA)按钮,按照泊车界面提示操作,进入泊车辅助过程;
步骤2:泊车辅助过程中,驾驶员不需要进行车辆操作,但需要时刻监控周边环境,随时准备制动车辆,确保在危险的情况下可以控制车辆。
完成泊车。
车辆停入目标车位后,泊车界面提示泊车完成,泊车辅助系统(APA)自动施加电子驻车制动(EPB),并挂入P档,此时由驾驶员介入车辆控制。
开启泊车辅助系统(APA),驾驶员确认目标车位。

步骤1:激活泊车辅助系统(APA)前,驾驶员须系好安全带,并确认车门、前舱盖以及尾门处于关闭状态;
步骤2:保持踩住制动踏板,点击“
”开关,开启泊车界面,选择自选车位,进入自选车位界面;
步骤3:泊车辅助系统(APA)默认提供垂直车位,双击车模可切换车位方向变换水平车位和斜列车位,选择所需车位类型,拖动车模确定车位位置,控制车模四轴可微调角度;右侧全景画面中将显示目标车位位置,驾驶员需确保所定位位置的可用性。
车辆辅助泊入。

步骤1:确认目标车位后,按照泊车界面提示操作,进入泊车辅助过程;
步骤2:泊车辅助过程中,驾驶员不需要进行车辆操作,但需要时刻监控周边环境,随时准备制动车辆,确保在危险的情况下可以控制车辆。
完成泊车。
车辆停入目标车位后,音响主机提示泊车完成,泊车辅助系统(APA)自动施加电子驻车制动(EPB),并挂入P档,此时由驾驶员介入车辆控制。
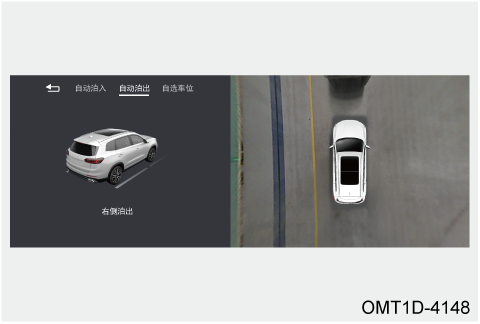
开启泊车辅助系统(APA),驾驶员选择泊出方向。

步骤1:激活泊车辅助系统(APA)前,驾驶员须系好安全带,并确认车门、前舱盖以及尾门处于关闭状态;
步骤2:启动发动机,变速器档位置于P档,点击泊车辅助系统(APA)按钮,开启泊车界面,选择辅助泊出,进入辅助泊出界面;
步骤3:驾驶员通过拨动组合开关的左/右转向灯选择泊出方向。
车辆辅助泊出。
步骤1:选择车辆泊出方向后,按照泊车界面提示操作,进入辅助泊出过程;
步骤2:辅助泊出过程中,驾驶员不需要进行车辆操作,但需要时刻监控周边环境,随时准备制动车辆,确保在危险的情况下可以控制车辆。
备注:辅助泊出的车位类型仅支持水平车位且前方有障碍物的存在。
完成泊车。
车辆辅助泊出后,音响主机提示泊车完成,泊车辅助系统(APA)自动施加电子驻车制动(EPB),并挂入P档,此时由驾驶员介入车辆控制。
| 阅读 |
|---|
|
| 注意 |
|---|
|
| 警告 |
|---|
|
泊车轨迹超出规划。
关联系统控制器故障。
寻找车位时车速>25km/h。
关闭电子稳定控制系统。
泊车过程中驾驶员主动控制方向盘。
泊车过程中驾驶员主动操作换档手柄。
泊车过程中驾驶员主动触碰油门踏板。
泊车过程中驾驶员主动开启电子驻车制动系统(EPB)。
泊车过程中车辆周围存在固定障碍物,车辆无法完成避让。
泊车过程中驾驶员再次按下泊车辅助系统(APA) 开关。
泊车过程中驾驶员长时间未按要求系上安全带或者未关闭车门等。
仲裁逻辑高于泊车辅助系统(APA)的程序被激活(例如:激活自适应巡航系统(ACC)、自动紧急制动系统(AEB)工作)。
挂车牵引杆和牵引钩。
比较纤细或呈楔形的物体。
影响目标识别的其他情形。
带有角和尖锐棱边的物体。
铁丝网篱笆、蓬松的雪、地面上的坑洞。
带有精细表面或结构的物体(例如:栅栏)。
物体位于探测范围上方,传感器无法进行准确探测。
某些表面不反射探测信号的物体和穿此类材质衣服的人。
处于高处且突出的物体(例如:装载物、墙体伸出部分)。
出现雨雪、大雾等恶劣天气。
备选车位附近路面坑洼,或存在路面有高差的人行道或停车位以及悬崖。
备选车位附近存在三轮或两轮非机动车、低矮的障碍物(例如:停车线、地锁和石块)或下车体无连续实体形态的车辆(例如:大卡车、油罐车和挂车)。